日本語
|
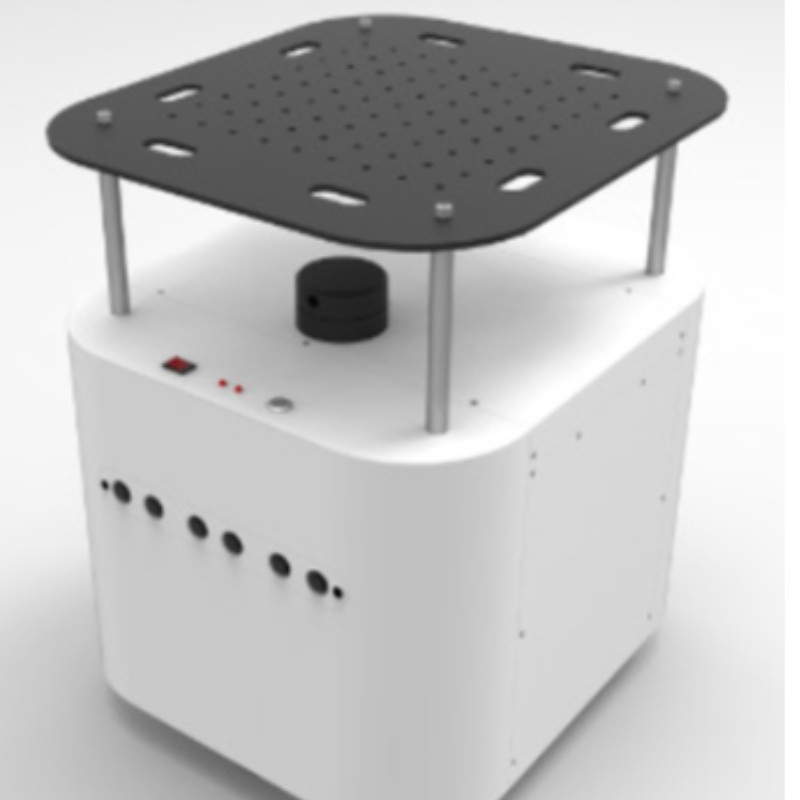
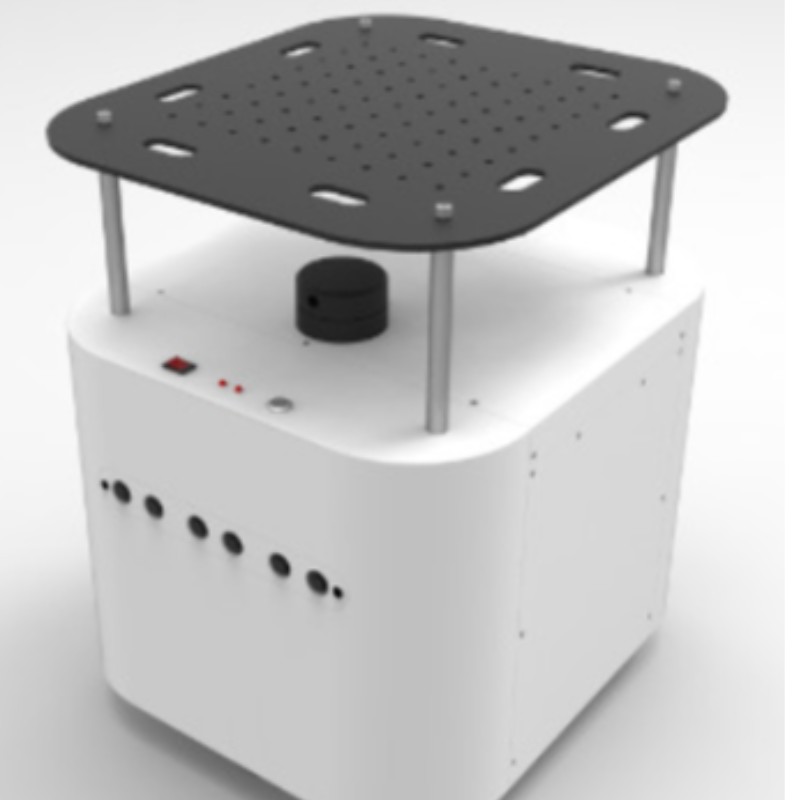
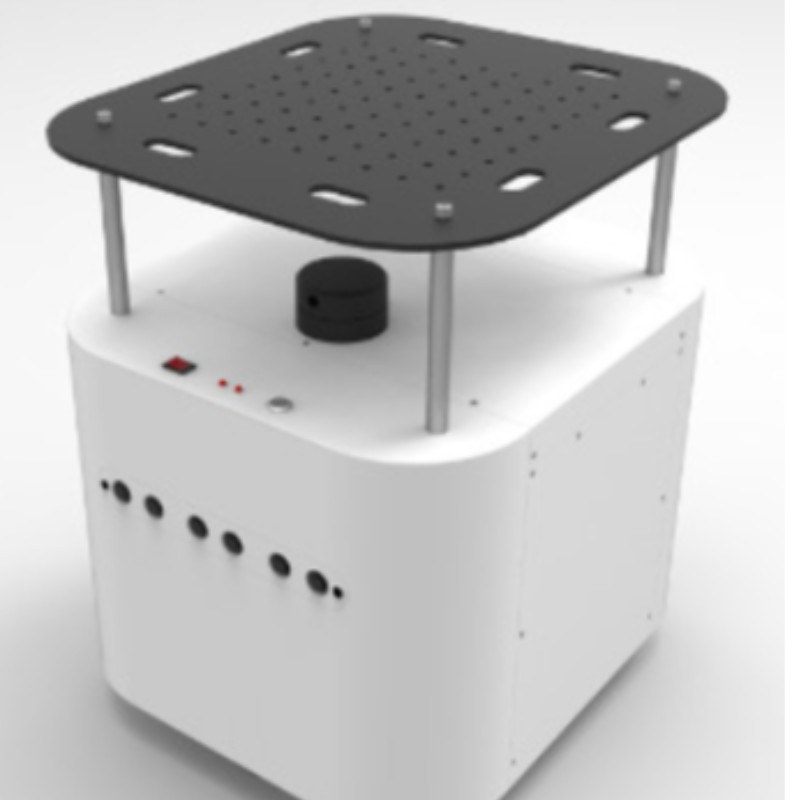
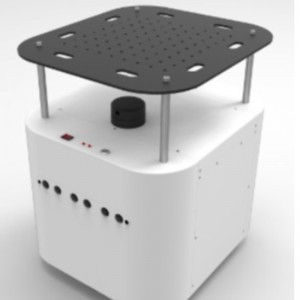
yz‐01 rosロボットプラットフォームは,rosアーキテクチャに基づく二輪差動大荷重ロボットシャシプラットフォームである。ロズロボット愛好家、大学生と中小企業の使用に非常に適しています
&
エンジニア.
シャシプラットホームは、高効率で高負荷の統合ハブモーターです。プラットフォームは、最大50 kgまでロードすることができ、最大の歩行速度は1メートルあたり1メートルに達することができます。YZ - 01 & CountのDCDC電力変換モジュールは5 V、12 V、19 Vと24 Vの4つの異なる電圧を提供することができます。そして、それは基本的にコンピュータマザーボードの大部分の電源問題とロボットが運ぶ必要があるいろいろなセンサーを解決することができます。
Developer Development Development Developer Development Development for Deep Research、ROSプラットフォームは、インテルCore - i 5の産業用PCを構築し、Ubuntu 16.04 O / S + ROSの動的パッケージを構築しました。同時に、他のRoSプラットフォームロボットのように、RoSロボットYZ - 01 Aは開発者が非常に簡単にそれを使用できるようにオープンソースの基本的なROSアプリケーションの例と基本的なモーション駆動のノードプログラムを提供します。

名前: Mr. Jackie
職名: Account Manager
部門: Sales
会社の電話番号: +86 755 21060118
Eメール: お問い合わせ
携帯電話: +86 15986775944
ウェブサイト: abtcharger.b2bjp.com
住所: 7th Fllor, Boni Building ,Guangming District, Shenzhen, Guangdong 518001 P.R. China

































 ユーザーログイン
ユーザーログイン